
- Contexte pédagogique
Ce projet s’inscrit dans le cadre de la formation initiale dispensée au sein du Campus Arts et Métiers de Metz. Il a été réalisé par deux étudiants de 2ème année (bac+4) durant l’année universitaire 2025-2026. Il s’est échelonné d’octobre à mai à raison d’une séance de 4h/semaine. L’objectif pédagogique est d’amener les étudiants à s’approprier un sujet et à le mener à son terme en autonomie. Ils sont néanmoins encadrés par un ou plusieurs enseignants qui ont pour rôle de leur apporter des méthodes de travail et des compléments de connaissances techniques et scientifiques. Ces projets sont soumis aux étudiants à la rentrée et ce sont eux qui choisissent le sujet sur lequel ils souhaitent travailler.
- Introduction
L’industrie aérospatiale et de défense se caractérise aujourd’hui par des produits de plus en plus complexes, exigeant une précision élevée, une fiabilité importante et une maîtrise rigoureuse des coûts. Afin de répondre à ces contraintes, l’ingénieur moderne s’appuie sur plusieurs outils numériques complémentaires tels que les systèmes de numérisation 3D, les logiciels de Conception et les équipements de Réalité Virtuelle. Les scanners 3D permettent de numériser des objets physiques existants afin d’obtenir une représentation numérique sous forme de nuage de points ou de maillage 3D, une solution particulièrement utile lorsque les fichiers CAO d’origine sont indisponibles, comme c’est souvent le cas dans le domaine militaire. Les logiciels de CAO, notamment CATIA V5, offrent quant à eux des fonctionnalités avancées de modélisation paramétrique permettant de créer des surfaces et des volumes précis exploitables tout au long du cycle de vie du produit. Enfin, les équipements de Réalité Virtuelle améliorent la perception et l’analyse des modèles numériques grâce à une immersion tridimensionnelle, facilitant ainsi la validation ergonomique, visuelle et fonctionnelle sans recourir à des prototypes physiques. Toutefois, l’intégration de ces différents outils constitue un défi majeur en raison de la nature hétérogène des données manipulées : les scanners génèrent des maillages discrets, les logiciels de CAO utilisent des surfaces paramétriques continues, tandis que les moteurs temps réel comme Unity nécessitent des géométries optimisées dans des formats spécifiques tels que FBX ou GLB. De plus, les différents formats de fichiers utilisés, comme STL ou OBJ pour les scans, CATPart ou STEP pour la CAO et FBX ou GLB pour la RV, imposent des étapes complexes de conversion et de reconstruction nécessitant une méthodologie rigoureuse.
Dans ce contexte, ce projet a pour objectif de formaliser et de valider deux processus complémentaires : le premier consiste à transformer une numérisation issue d’un scanner en un modèle surfacique exploitable dans un logiciel de CAO à l’aide de CATIA V5; le second vise à convertir un modèle CAO en un environnement de Réalité Virtuelle immersif et interactif grâce à Blender pour le texturage et Unity pour la mise en scène. Ces deux processus sont appliqués au Mirage 2000D, avion de combat biplace de l’Armée de l’Air française, dont la géométrie complexe constitue un excellent cas d’étude pour la validation des méthodologies développées. Cet article est structuré en trois chapitres : le premier présente un état de l’art de la réalité virtuelle, le deuxième détaille la rétroconception surfacique sur CATIA V5, tandis que le troisième est consacré à la mise en scène sous Unity et à l’exploitation en Réalité Virtuelle. Un bilan du projet clôturera cet article.
- État de l’art concernant la Réalité Virtuelle (RV)
- Introduction
La réalité virtuelle (Virtual Reality – VR) est une technologie numérique qui permet à un utilisateur d’être immergé totalement dans un environnement artificiel généré par ordinateur. Cet environnement peut reproduire un espace réel ou imaginaire et permet une interaction en temps réel grâce à des dispositifs spécifiques tels que des casques de réalité virtuelle, des capteurs de mouvement et des contrôleurs manuels.
Contrairement à la réalité augmentée, qui superpose des éléments virtuels au monde réel, la réalité virtuelle isole complètement l’utilisateur de son environnement physique pour le plonger dans un monde numérique tridimensionnel. Cette immersion favorise une perception réaliste des volumes, des distances et des interactions, ce qui rend la VR particulièrement adaptée aux domaines de la formation, de l’ingénierie et de la simulation.
-
- Historique :
Les premières idées liées à la réalité virtuelle apparaissent dans les années 1950, avec des dispositifs expérimentaux visant à stimuler les sens humains. En 1968, Ivan Sutherland développe l’un des premiers casques immersifs appelé Sword of Damocles, considéré comme l’ancêtre des casques de réalité virtuelle modernes. Dans les années 1980 et 1990, le terme « Virtual Reality » est popularisé et les premières applications industrielles et militaires voient le jour, notamment pour la simulation de vol et l’entraînement des pilotes. Cependant, les limitations technologiques de l’époque (coût élevé, faible puissance de calcul) freinent son développement à grande échelle. À partir des années 2010, grâce aux progrès de l’informatique graphique, des capteurs et des écrans haute résolution, la réalité virtuelle connaît un fort essor. Des entreprises comme HTC, Oculus (Meta) et Valve développent des casques performants accessibles au grand public et aux institutions éducatives. Aujourd’hui, la VR est largement utilisée dans l’industrie, l’enseignement supérieur et la recherche.
-
- Composants et fonctionnement d’un système de Réalité Virtuelle et logiciels associés :
Un système de réalité virtuelle repose sur un ensemble de composants matériels permettant l’immersion et l’interaction de l’utilisateur avec un environnement numérique tridimensionnel. Le composant principal est le casque de réalité virtuelle (Head Mounted Display – HMD). Il est équipé de deux écrans, d’optiques et de capteurs qui affichent une scène en relief et suivent les mouvements de la tête de l’utilisateur afin d’adapter l’affichage en temps réel. Les contrôleurs manuels permettent à l’utilisateur d’interagir avec l’environnement virtuel (sélection, manipulation d’objets, navigation). Ils sont dotés de capteurs de position et de boutons de commande. Les capteurs de suivi sont utilisés pour détecter les déplacements de la tête et des mains dans l’espace. Ces capteurs assurent une correspondance fidèle entre les mouvements réels de l’utilisateur et ceux reproduits dans le monde virtuel. Enfin, une station de calcul (ordinateur) équipée d’une carte graphique performante est nécessaire pour assurer le rendu 3D en temps réel et garantir une expérience fluide.
Mais tous ces éléments matériels ne peuvent fonctionner que s’ils sont pilotés par des composants logiciels qui sont regroupés à travers des plateformes dédiées. Parmi les plus répandues, on trouve :
- SteamVR : C’est l’interface de référence pour le matériel HTC Vive (utilisé à l’ENSAM). Elle gère le « tracking » (suivi de position) et assure que l’image est rafraîchie pour éviter le malaise de l’utilisateur.
- Standard OpenXR : C’est une API universelle qui permet de rendre une application compatible avec tous les casques sans réécriture de code. C’est la clé de l’interopérabilité industrielle.
- Lien avec le PLM (Product Lifecycle Management) : Des plateformes comme la 3DEXPERIENCE de Dassault Systèmes intègrent nativement la VR pour lier le modèle virtuel à toutes les étapes de vie du produit.
Quant aux environnements virtuels, ils sont quant à eux créés via des logiciels de construction et de gestion de modèle 3D dont certains sont issus du monde des graphistes. À noter que ces outils manipulent des modèles 3D dont la nature diffère totalement avec ceux générés par les logiciels de CAO (conception Assistée par Ordinateur). Ces derniers on recourt à des modèles de type « B-Rep » constitués de face, d’arêtes et de sommets, alors que les premiers fonctionnent à partir de modèles constitués d’un nuage de point maillé et texturé. Cet aspect est très important dans le cas d’une utilisation en bureau d’études, car il nécessitera des transformations et des conversions de modèles et induira des ruptures de chaine numérique. Parmi les logiciels de création d’environnements virtuels, les plus courants sont :
- Unity : Unity est l’un des moteurs de création 3D temps réel les plus utilisés au monde pour le développement d’expériences immersives en réalité virtuelle (VR), réalité augmentée (AR) et applications interactives. Il offre des outils complets pour importer des modèles 3D, générer des scènes, gérer les interactions et déployer sur de nombreuses plateformes VR (Oculus, SteamVR, Quest, etc.). [24]
- Unreal Engine : Unreal Engine est un moteur 3D temps réel très puissant, particulièrement reconnu pour ses capacités de rendu photoréaliste et son système Blueprints qui facilite la création visuelle d’environnements interactifs. Il est largement utilisé aussi bien dans les jeux vidéo que dans la visualisation industrielle, la formation immersive ou les simulations VR.
- CRYENGINE : CRYENGINE est un moteur 3D avancé conçu pour générer des environnements immersifs avec des graphismes haut de gamme, incluant le support VR sur différents casques (HTC Vive, Oculus, etc.). Il offre aussi des outils de simulation, d’éclairage et de physique en temps réel.
À noter que ces logiciels permettant de construire une scène peuvent nécessiter l’utilIsation préalable de logiciels plus complets pour réaliser les étapes de maillage et de texturage.
- Rétroconception surfacique sur CATIA V5
- Introduction :
Ce chapitre détaille la première grande étape de la chaîne numérique étudiée dans ce projet : la transition entre deux types de représentations numériques distinctes. Le modèle de départ, issu d’une numérisation par scan 3D, est un fichier STL constitué d’un nuage de points maillés. Cette représentation dite « discrète » est formée d’une multitude de facettes triangulaires reliant des points dans l’espace pour approximer la forme de l’appareil. L’objectif de la reconstruction est d’aboutir à un modèle de type « B-Rep » (Boundary Representation), standard des logiciels de CAO. Contrairement au maillage, le B-Rep définit l’objet par ses limites géométriques via des entités mathématiques continues, telles que des surfaces lisses et des courbes précises. Cette conversion est indispensable pour permettre l’étude technique et l’intégration de nouveaux dispositifs de maintenance, une tâche qui requiert la précision et la modularité que seul un modèle volumique ou surfacique paramétré peut offrir.
-
- Méthodologie du processus de conception géométrique :
Pour la création du modèle géométrique, il est nécessaire de suivre les grandes étapes suivantes afin de transformer les données de référence en surfaces 3D exploitables :
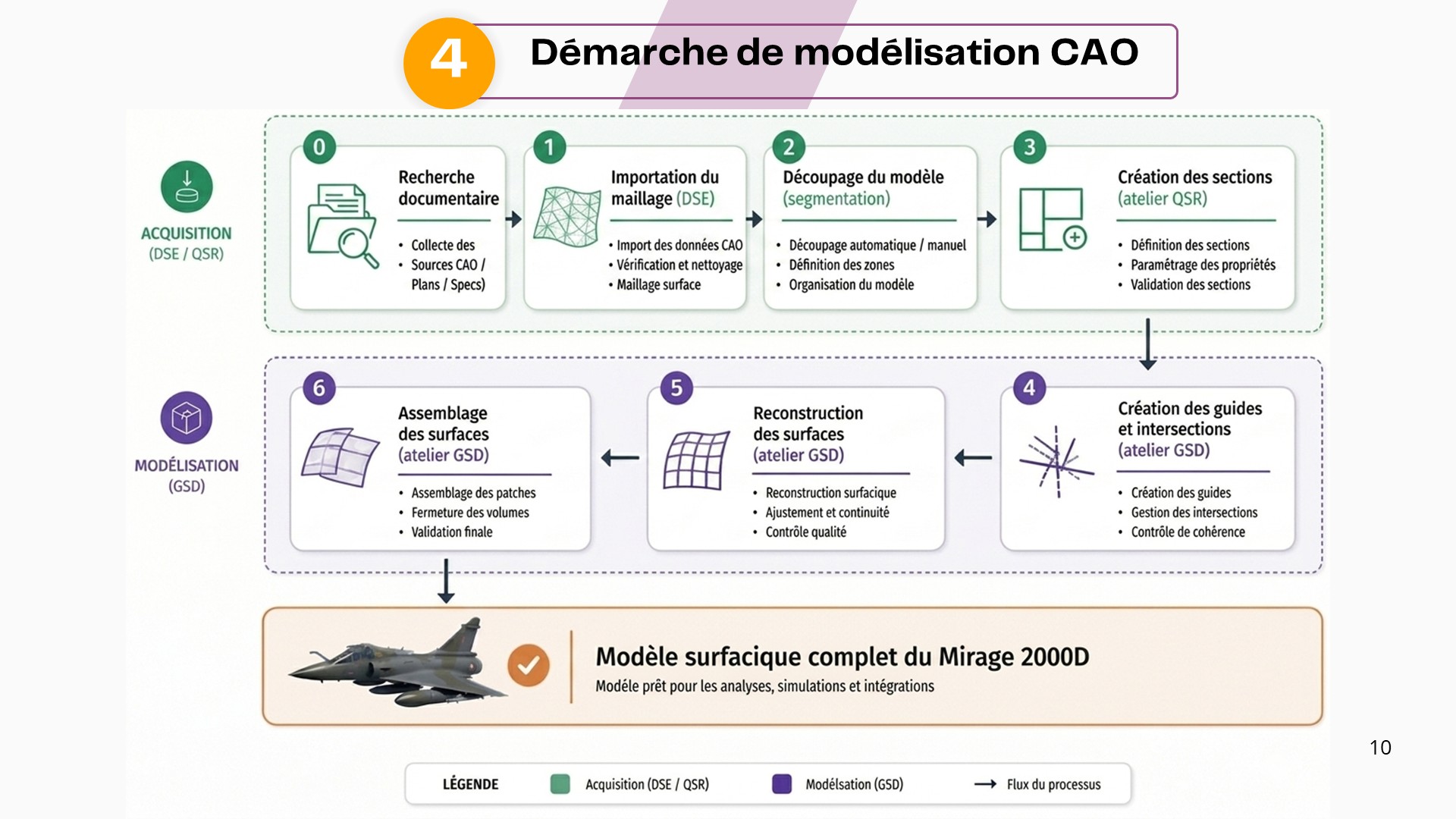
Démarche de reconstruction d’un modèle géométrique 3D à partir de données issues d’une numérisation
Celle-ci a été mise en œuvre pour modéliser l’enveloppe surfacique du Mirage 2000. Un modèle géométrique 3D issu d’un jeu vidéo a été utilisé en tant que données d’entrée, car il est de même nature que ceux générés par les logiciels de numérisation (nuage de points maillé). Ce cas d’étude a bien permis de valider sa pertinence, mais elle a également mis en évidence certaines difficultés, notamment la gestion des raccords complexes entre les différentes zones du fuselage ainsi que le temps important nécessaire aux opérations répétitives de reconstruction. Malgré ces contraintes, les principales parties de l’avion, telles que le fuselage, les ailes et les entrées d’air, ont été modélisées avec succès, validant ainsi la méthodologie adoptée pour transformer des données numérisées en géométrie CAO exploitable.
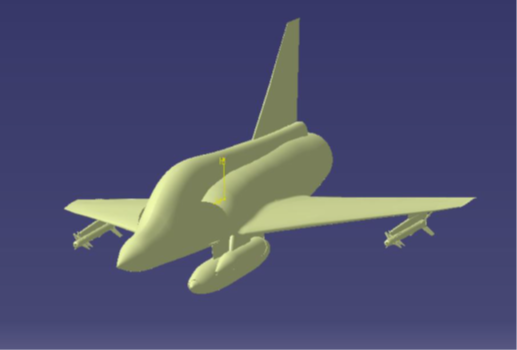
Modèle géométrique 3D de type « B-Rep » exploitable en CAO
- Mise en scène en RV sur Blender et Unity
- Introduction :
Ce troisième chapitre est consacré à la seconde grande étape de la chaîne numérique : le passage d’un modèle géométrique issu d’un logiciel de CAO à un environnement de Réalité Virtuelle immersif et interactif. Le point de départ de notre travail est le nuage de points (fichier STL) que nous avons utilisé pour la modélisation. L’objectif final est une scène virtuelle complète, déployable sur les équipements du VR Lab de l’ENSAM, dans laquelle le Mirage 2000D est intégré dans un contexte aéronautique réaliste comprenant un hangar et un environnement naturel.
-
- Méthodologie de mise en scène :
La démarche adoptée pour la mise en scène du Mirage 2000D suit les grandes étapes suivantes :
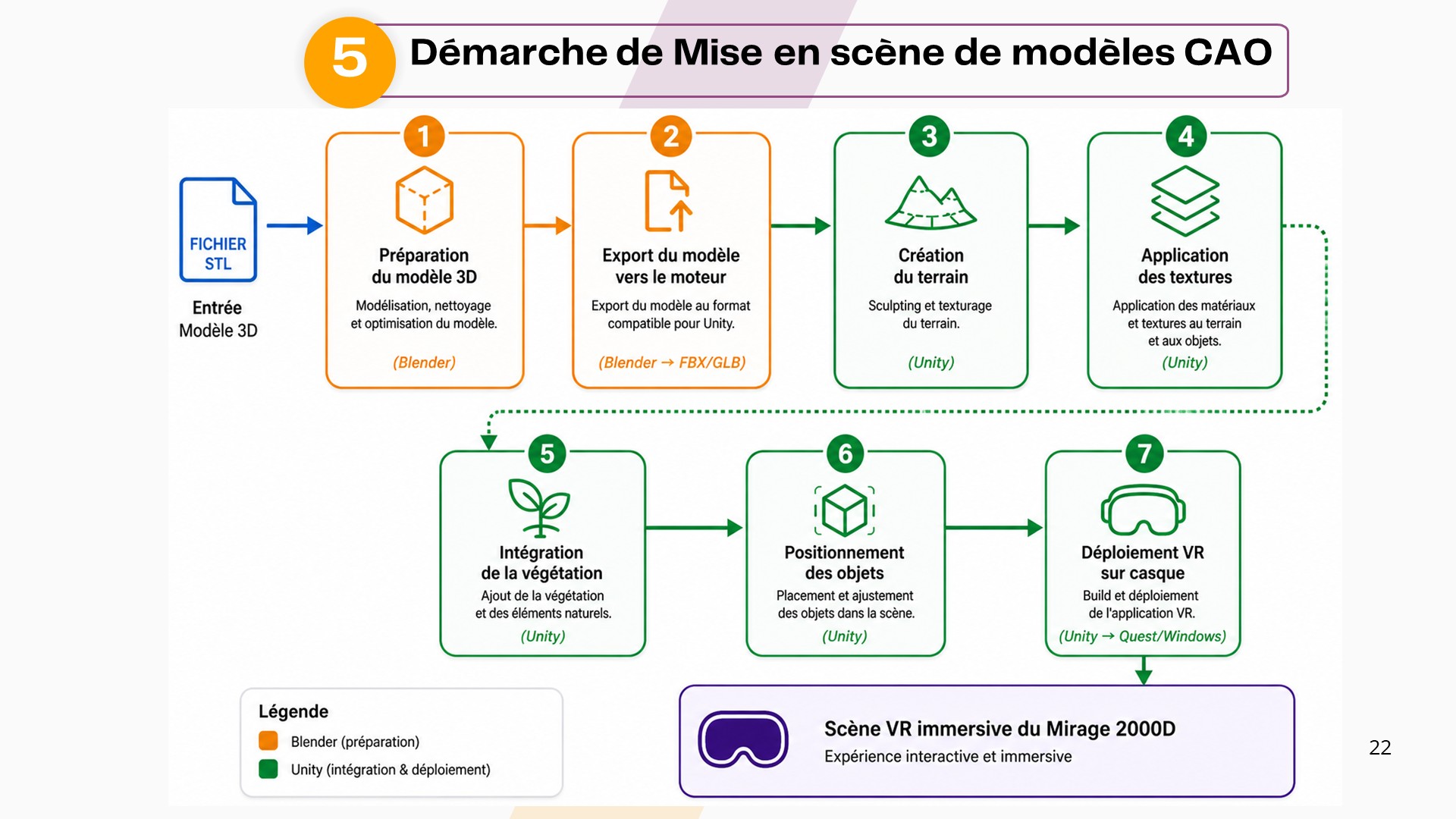
Démarche de construction d’une scène de RV à partir de données CAO
Elle a été mise en œuvre à partir du modèle CAO du Mirage 2000 présenté précédemment. La scène a été créée autour de l’avion immergé dans un environnement constitué par un hangar et complété par différents autres objets. Comme pour la première partie du projet, ce cas d’étude à parmi de valider la démarche proposée. Ainsi, plusieurs difficultés techniques ont été rencontrées, notamment la conversion entre formats (CATIA, Blender, Unity), la gestion des matériaux et ombres, ainsi que les problèmes d’échelle entre les logiciels (millimètres vs mètres). Ces points ont nécessité des corrections et vérifications pour assurer la cohérence de la scène. Finalement, une scène VR réaliste a été obtenue, intégrant le modèle texturé du Mirage 2000D dans un environnement complet et exploitable sur le VR Lab de l’ENSAM, constituant une base solide pour des applications immersives futures.


Scène de réalité virtuelle créée autour de l’avion.
- Bilan du projet
Ce projet avait pour objectif de formaliser et de valider deux processus complémentaires au sein d’une chaîne numérique complète reliant la numérisation 3D, la CAO et la Réalité Virtuelle, appliquée au cas du Mirage 2000D.
Le premier processus, présenté, concerne le passage d’un maillage 3D issu d’un scanner vers un modèle surfacique paramétrique sous CATIA V5. Les différentes étapes de segmentation, d’extraction de sections, de création de guides et de génération de surfaces Multi-Sections ont permis d’obtenir un modèle cohérent, fidèle aux données de numérisation et exploitable en CAO.
Le second processus, traite de l’intégration de ce modèle CAO dans un environnement de Réalité Virtuelle immersif. La chaîne Blender (texturage et préparation des assets) puis Unity (mise en scène et déploiement) a permis d’intégrer le Mirage 2000D dans un environnement aéronautique réaliste, interactif et exploitable sur les équipements du VR Lab de l’ENSAM.
Sur le plan des difficultés rencontrées, ce projet a mis en évidence les problèmes d’interopérabilité entre logiciels aux architectures différentes : raccords géométriques complexes sous CATIA, conversions de formats, compatibilité des matériaux et gestion des échelles. Ces difficultés traduisent une problématique centrale de la conception : les ruptures de la chaîne numérique, qui imposent de nombreux rebouclages entre CATIA, Blender et Unity. Or, la conception vise trois objectifs performance, coût et délai. Si le rendu VR immersif atteint l’objectif de performance, le temps consacré aux conversions et à l’intégration pénalise fortement le coût et le délai, ce qui interroge la pertinence de cette chaîne d’outils au regard du service rendu.
Sur le plan critique, CATIA V5 reste puissant pour la reconstruction surfacique mais sa chaîne de rétroconception est longue et manuelle. Blender est efficace pour la texturation, mais sensible aux pertes liées aux conversions. Unity est adapté à la VR et au prototypage rapide, mais manque de précision dimensionnelle face aux outils CAO.
En conclusion, ce projet démontre la faisabilité d’une chaîne numérique complète combinant CAO et Réalité Virtuelle, tout en soulignant les efforts nécessaires pour assurer une intégration fluide. Il propose ainsi une base méthodologique réutilisable pour des projets similaires à l’ENSAM.



