
Mise au point de drones aériens autonomes et collaboratifs pour la détection précoce d’incendies en milieu forestier.
Proposition de l’équipe des Arts et Métiers pour le Dassault UAV Challenge.

Cet article présente la proposition de l’équipe des Arts et Métiers au Dassault UAV Challenge. Il s’agit une compétition entre écoles d’ingénieurs organisée par Dassault Aviation dont le but est de concevoir et développer un ou plusieurs drones autonomes répondant à des exigences imposées et personnelles. Notre proposition consiste en un système de détection précoce d’incendies en milieu forestier et d’intervention rapide. Ce système se compose de deux drones :
- un avion capable de couvrir une vaste zone par son autonomie et capable de vision thermique

- un hexacoptère muni d’une caméra classique et de moyens d’extinction

L’idée étant que l’avion puisse réaliser une primo-détection par sa caméra thermique puis transmettre un ordre de décollage immédiat à l’hexacoptère afin de rallier la zone, permettre une confirmation du type de feu et de sa position précise (caméra classique) puis réaliser le largage d’un produit ignifuge sur le point chaud si besoin est.
Notre équipe est composée de 5 étudiants de dernière année : tous passionnés d’aéronautique, de modélisme ou de robotique (voire les trois !). Par nos cursus, nous avons dû principalement travailler à distance, réel défi de notre groupe, en se divisant les tâches en pôles, à l’instar des grandes entreprises aéronautiques dont la répartition du travail est segmentée :
- Bordeaux (3 personnes) : réalisation de l’avion, vision thermique, hexacoptère
- Paris (1 personne) : automatisation, documentation, hexacoptère
- Sheffield (1 personne) : vision thermique, atterrissage autonome, tâches
administratives
En septembre 2024, 17 équipes se sont inscrites. De ces 17, début décembre seules 7 ont été sélectionnées comme finalistes. Nous sommes fiers d’être la première équipe œuvrant à distance à s’être qualifiée en finale.
Le jour de la compétition, notre hexacoptère était fonctionnel: équipé d’une Raspberry Pi5, d’une Pixhawk 2.4.7 flashée sous Arducopter ainsi que d’un caméra visible, il était doté d’un moyen de largage de notre charge imprimé en 3D consistant en une goupille libérée par un servomoteur. La Pixhawk constituait l’autopilote du drone, et la Raspberry l’ordinateur de bord, celle-ci faisant tourner notre programme de gestion de mission sous ROS2 ainsi que l’algorithme de détection d’incendie par Machine Learning.
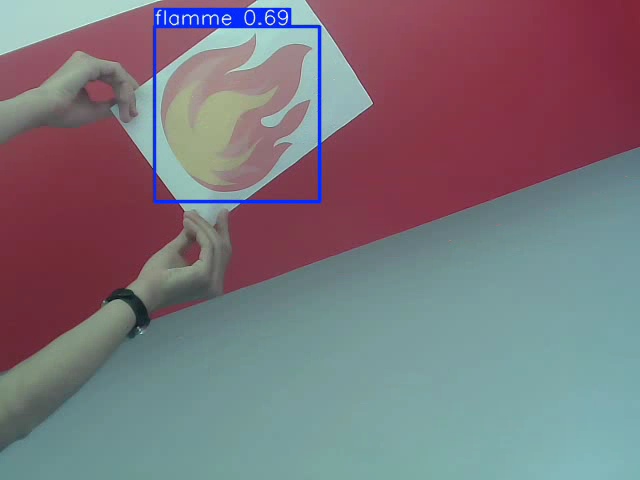
Cet algorithme est un modèle de détection d’objets appelé YOLOv8. Nous avons pris de nombreuses photos de notre départ de feu virtuel, un logo flamme, dans différents contextes et positions afin de constituer un grand jeu de données. Nous avons ensuite « labellé » chaque photo, c’est à dire indiqué à l’algorithme où se trouve l’objet à reconnaitre dans l’image. Ce travail achevé pour environ 700 photos, un modèle Yolov8 était prêt à l’entrainement, et une fois celui-ci complété, le modèle savait reconnaitre avec précision notre logo flamme dans un arrière-plan chargé (herbe, branches, etc) en quelques milisecondes, permettant un traitement de l’image embarqué et un déclenchement du largage des l’incendie détecté .
Notre avion était équipé d’une Pixhawk et une RaspberryPi similaires, lui permettant de voler de manière autonome. Il était également doté d’une caméra thermique sous l’aile. Les RaspberryPI des deux aéronefs, connectées au même réseau Wifi amplifié par une antenne au sol, pouvaient communiquer et l’avion était donc capable, lors de la détection d’un point chaud à sa verticale, communiquer la position GPS à la Raspberry PI de l’hexacoptère d’intervention et déclencher sa mission. Cependant, le jour de la compétition, notre avion a subi des dommages lors d’un vol et n’était pas réparable dans le temps imparti. Nous avons alors décidé de nous replier sur une solution de secours que nous avions prévue, un drone quadricoptère sur lequel nous avons transféré tous les équipements de l’avion en une nuit, afin de pouvoir « émuler » la présence de l’avion et démontrer les mission avec deux plateformes en vol simultané, même si ce n’était plus un avion de grande autonomie qui effectuait la patrouille.

Nous avons ainsi pu démontrer à Dassault la majorité des capacités initialement prévues: vol autonome simultané, envoi par le drone de surveillance d’un ordre de mission au drone hexacoptère, détection de l’incendie par machine learning et largage automatique de la charge anti-incendie sur l’objectif, puis retour des deux drones à leur base. Et ce, de façon automatisée!
Ces démonstrations nous ont permis de décrocher la seconde place du podium au Dassault UAV Challenge 2025, et nous espérons pouvoir transmettre notre association, les connaissances et l’expérience acquise à une équipe voulant relever le défi en 2026!
Ce projet n’aurait pas été possible sans l’aide financière de CaMéX-IA que nous remercions chaleureusement.
Merci de voter pour encourager l’équipe de l’édition suivante!

Ressources utiles : Lien du rapport technique final de la compétition pour plus de détails!


 avec un casque HoloLens sur un support pédagogique")
